#include <TxtVacuumGripperRobot.h>
|
| enum | State_t {
__NO_STATE,
FAULT,
INIT,
IDLE,
FETCH_WP_VGR,
VGR_WAIT_FETCHED,
MOVE_VGR2MPO,
START_PRODUCE,
MOVE_PICKUP_WAIT,
MOVE_PICKUP,
START_DELIVERY,
COLOR_DETECTION,
WRONG_COLOR,
NFC_RAW,
NFC_PRODUCED,
NFC_REJECTED,
STORE_WP_VGR,
STORE_WP,
CALIB_HBW,
CALIB_SLD,
CALIB_DPS,
CALIB_DPS_NEXT,
CALIB_VGR,
CALIB_VGR_NAV,
CALIB_VGR_MOVE
} |
| |
| Enumerator |
|---|
| __NO_STATE |
|
| FAULT |
|
| INIT |
|
| IDLE |
|
| FETCH_WP_VGR |
|
| VGR_WAIT_FETCHED |
|
| MOVE_VGR2MPO |
|
| START_PRODUCE |
|
| MOVE_PICKUP_WAIT |
|
| MOVE_PICKUP |
|
| START_DELIVERY |
|
| COLOR_DETECTION |
|
| WRONG_COLOR |
|
| NFC_RAW |
|
| NFC_PRODUCED |
|
| NFC_REJECTED |
|
| STORE_WP_VGR |
|
| STORE_WP |
|
| CALIB_HBW |
|
| CALIB_SLD |
|
| CALIB_DPS |
|
| CALIB_DPS_NEXT |
|
| CALIB_VGR |
|
| CALIB_VGR_NAV |
|
| CALIB_VGR_MOVE |
|
| virtual ft::TxtVacuumGripperRobot::~TxtVacuumGripperRobot |
( |
| ) |
|
|
virtual |
| void ft::TxtVacuumGripperRobot::configInputs |
( |
| ) |
|
|
protected |
| EncPos3 ft::TxtVacuumGripperRobot::getPos3 |
( |
| ) |
|
|
inline |
| std::string ft::TxtVacuumGripperRobot::getTarget |
( |
| ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::grip |
( |
| ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::initDashboard |
( |
| ) |
|
|
protected |
| void ft::TxtVacuumGripperRobot::moveCalibPos |
( |
| ) |
|
|
protected |
| void ft::TxtVacuumGripperRobot::moveColorSensor |
( |
bool |
half = false | ) |
|
| void ft::TxtVacuumGripperRobot::moveDeliveryInAndGrip |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveDeliveryOutAndRelease |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveFromHBW1 |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveFromHBW2 |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveJoystick |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveMPO |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveNFC |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveRef |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveRefYNFC |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveSSD1 |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveSSD2 |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveSSD3 |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveToHBW |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveWrongRelease |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveXEnd |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveXRef |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveYEnd |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveYRef |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveZEnd |
( |
| ) |
|
| void ft::TxtVacuumGripperRobot::moveZRef |
( |
| ) |
|
| std::string ft::TxtVacuumGripperRobot::nfcDeviceDeleteWriteRawRead |
( |
std::vector< int64_t > |
vts, |
|
|
uint8_t |
mask_ts |
|
) |
| |
| std::string ft::TxtVacuumGripperRobot::nfcDeviceWriteProducedRead |
( |
std::vector< int64_t > |
vts, |
|
|
uint8_t |
mask_ts |
|
) |
| |
| std::string ft::TxtVacuumGripperRobot::nfcDeviceWriteRejectedRead |
( |
std::vector< int64_t > |
vts, |
|
|
uint8_t |
mask_ts |
|
) |
| |
| void ft::TxtVacuumGripperRobot::printEntryState |
( |
State_t |
state | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::printExitState |
( |
State_t |
state | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::printState |
( |
State_t |
state | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::release |
( |
| ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestExit |
( |
const std::string |
name | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestHBWcalib_end |
( |
| ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestHBWcalib_nav |
( |
| ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestHBWfetched |
( |
TxtWorkpiece * |
wp | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestHBWstored |
( |
TxtWorkpiece * |
wp | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestMPOstarted |
( |
TxtWorkpiece * |
wp | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestNfcDelete |
( |
| ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestNfcRead |
( |
| ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestOrder |
( |
TxtWPType_t |
type | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestQuit |
( |
| ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestSLDcalib_end |
( |
| ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::requestSLDsorted |
( |
TxtWPType_t |
type | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::run |
( |
| ) |
|
|
protectedvirtual |
| void ft::TxtVacuumGripperRobot::setSpeed |
( |
int16_t |
s | ) |
|
| void ft::TxtVacuumGripperRobot::setTarget |
( |
std::string |
t | ) |
|
|
inline |
| void ft::TxtVacuumGripperRobot::stop |
( |
| ) |
|
| const char* ft::TxtVacuumGripperRobot::toString |
( |
State_t |
state | ) |
|
|
inline |
| int ft::TxtVacuumGripperRobot::calibColorValues[3] |
|
protected |
| State_t ft::TxtVacuumGripperRobot::currentState |
|
protected |
| EncPos3 ft::TxtVacuumGripperRobot::lastPos3 |
|
protected |
| State_t ft::TxtVacuumGripperRobot::newState |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqHBWcalib_end |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqHBWcalib_nav |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqHBWfetched |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqHBWstored |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqJoyData |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqMPOstarted |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqNfcDelete |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqNfcRead |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqOrder |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqQuit |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqSLDcalib_end |
|
protected |
| bool ft::TxtVacuumGripperRobot::reqSLDsorted |
|
protected |
| std::string ft::TxtVacuumGripperRobot::target |
|
protected |
| const int ft::TxtVacuumGripperRobot::ydelta = 50 |
The documentation for this class was generated from the following file:
 Public Attributes inherited from ft::TxtSimulationModel
Public Attributes inherited from ft::TxtSimulationModel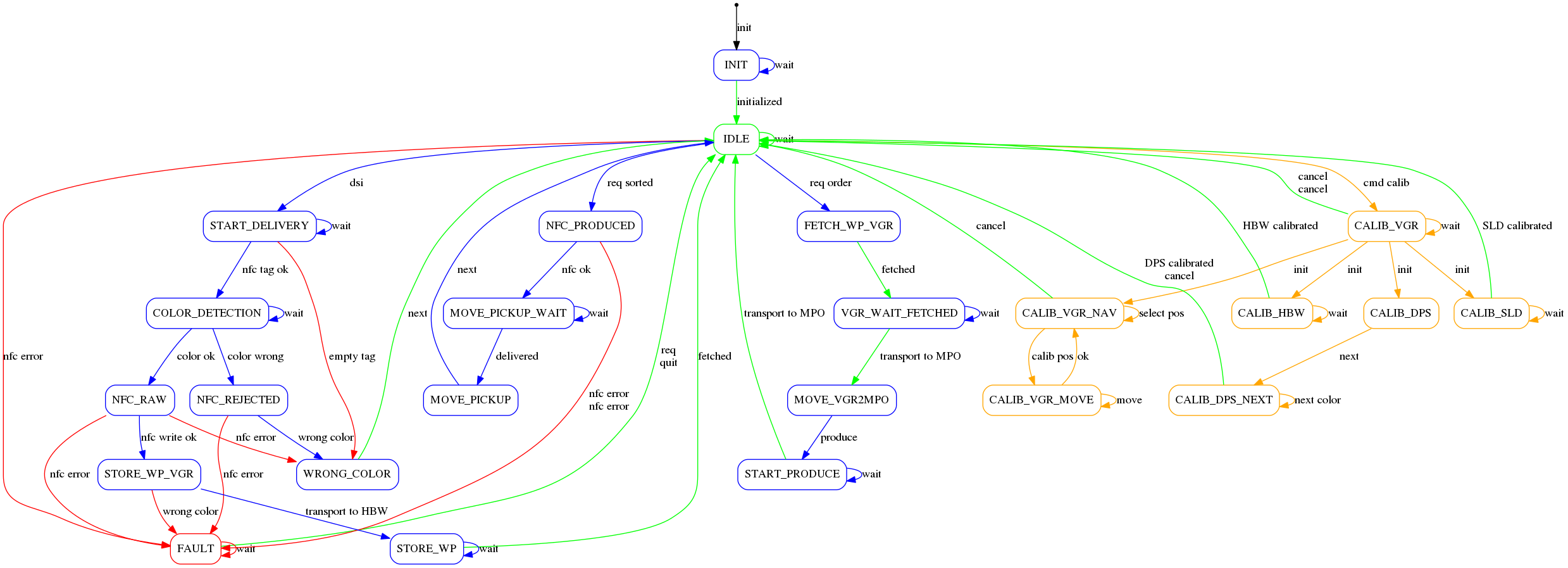
 1.8.11
1.8.11 
